Reading from Bebop¶
Camera¶
The video stream from Bebop’s front camera is published on image_raw topic as sensor_msgs/Image messages. bebop_driver complies with ROS camera interface specifications and publishes camera information and calibration data to camera_info topic. Due to limitations in Parrot’s ARDroneSDK3, the quality of video stream is limited to 640 x 368 @ 30 Hz. The field of view of this virtual camera (based on our measurements) is ~80 (horizontal) and ~50 (vertical) degrees.
To set the location of camera calibration data, please check this page: Configuring Bebop and the Driver. Since v0.4, the package ships with a default camera caliberation file located at bebop_driver/data/bebop_front_calib.yaml. Both default node/nodelet launch files, load this file when executing the driver.
Standard ROS messages¶
Odometery¶
New in version 0.5.
- ROS Topic:
odom - ROS Message Type:
nav_msgs/Odometry
The driver integerates visual-inertial velocity estimates reported by Bebop’s firmware to calculate the odometery. This message contains both the position and velocity of the Bebop in an ENU aligned odometery frame also named as odom. This frame name is configurable (see Driver Parameters) The cooridnate frame convention complies with ROS REP 103 (ROS Standard Message Types (i.e Twist, Odometery) - REP 103). Please not that since odometery is calculated from Bebop States (see States (aka Navdata)), the update rate is limited to 5 Hz.
Joint States (Pan/Tilt of The Virtual Camera)¶
New in version 0.5.
- ROS Topic:
joint_states - ROS Message Type:
sensor_msgs/JointState
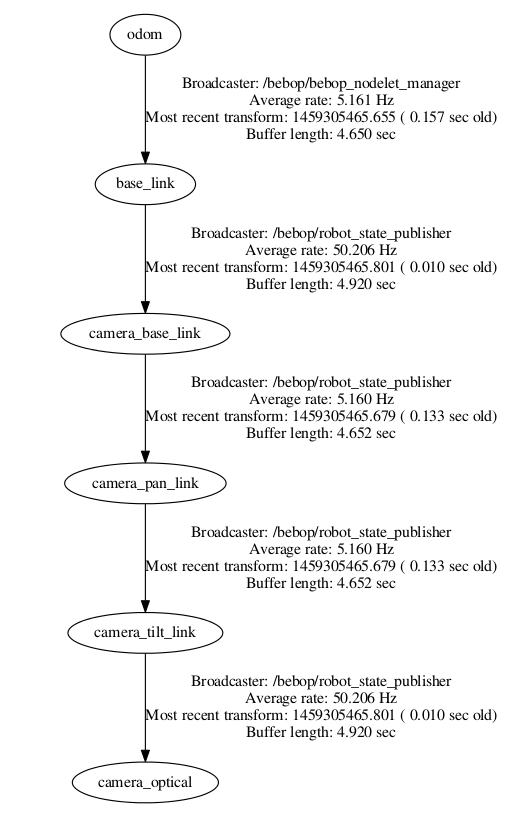
TF¶
New in version 0.5.
The driver updates the following TF tree based on a simple kinematic model of the Bebop (provided by bebop_description) pacakge, the current state of the virtual camera joints and the calculated odometery (if publish_odom_tf is set, see Driver Parameters).